Information
- Paper topic: Animation
- Software type: Code
- Able to run a replicability test: True
- Replicability score: 5
- License: MIT
- Build mechanism: Makefile, Not applicable (python, Matlab..)
- Dependencies: libbullet/eigen3/opengl/freeglut/glew/swig/openmpi/tensorflow
- Documentation score {0,1,2}: 1
- Reviewer: Julie Digne
Source code information
Comments
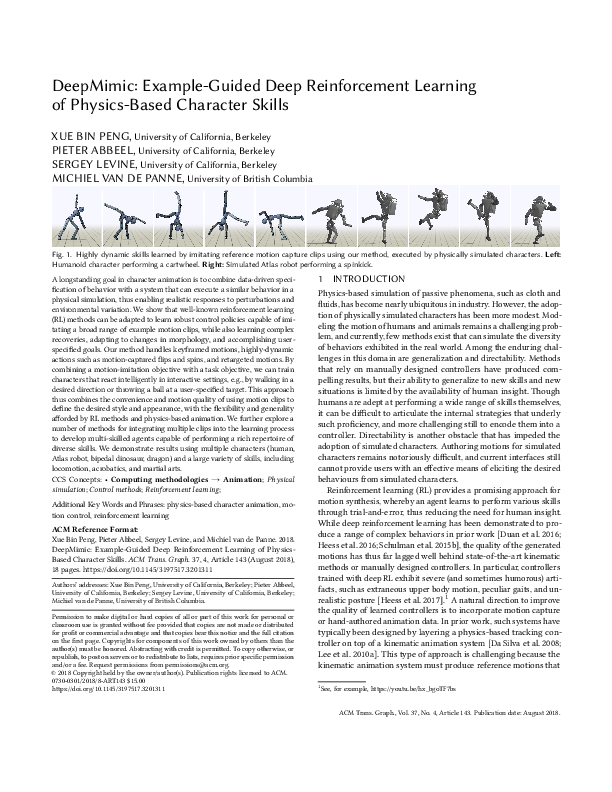
I was able to run and visualize pretrained policies + learned a policy training "humanoid3d_spinkick_args.txt